)
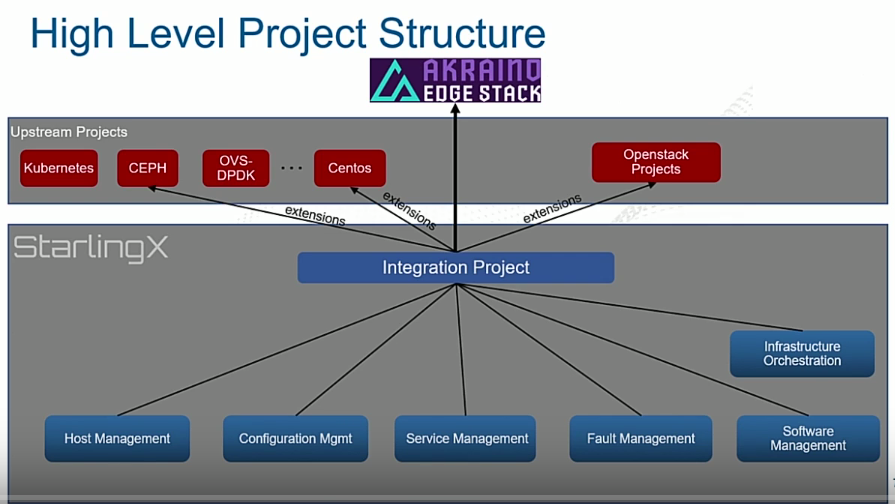
StarlingX is both a development project and an integration project that combines new services with many other open source projects into an overall edge cloud software stack. Based on code contributed by Intel and Wind River and hosted by the OpenStack Foundation, it combines components of its own with leading open-source projects including OpenStack, Ceph and OVS.
StarlingX aims to support the most demanding applications in edge, industrial IOT and telecom use cases. And there are already a lot of cutting-edge ideas for it. According to a recent talk from Intel dev-ops lead Hazzim Anaya, they include small-cell services for stadiums and other high-density locations, augmented reality, virtual reality and tactile Internet applications, vehicle-to-everything (V2X) communication, virtual network functions (VNFs) and more.
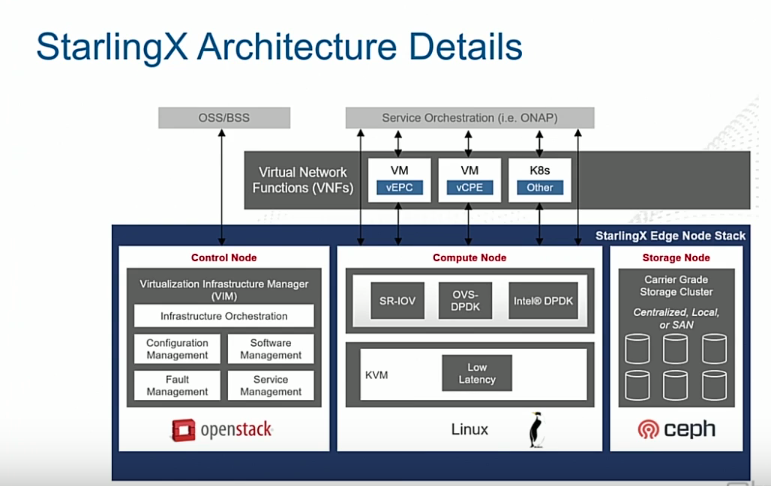
At the Vancouver Summit, Ian Jolliffe, Brent Rowsell and Dean Troyer offered a deep dive into the StarlingX architecture and features. “OpenStack is the base layer, but there’s a number of extra things that we layer on top of that,” said Jollife. “These are going to form the basis of some new projects within Starling X, so things like fault management, service management — managing and monitoring all the different services on the platform so that you can have a synchronous process failure and automatic recovery software management.”
The small, agile structure is definitely by design. “We want to be able to have a very small footprint edge solution — storage control and compute — with virtual machines on a single server and we call that the gross configuration…this is not going to provide you hardware level redundancy but if a VM fails you can automatically recover it and it goes back into service very quickly in less than a second,” Joliffe adds.
There are two more “sizes” available, called Grouse and Robson after mountain ranges in the Vancouver area. The next scale up is a two-node configuration giving users hardware redundancy and allowing users move virtual machines around from one node to another, but still offering storage control and compute all in a single node. Lastly, the larger largest scale, Robson, offers nodes for the control plane and dedicated nodes for compute as well as dedicated nodes for storage. Check out the whole 38-minute session on YouTube.
What’s next
At the upcoming Berlin Summit, there are three sessions focusing on StarlingX.
- “Comparing Open Edge Projects” offers a detailed look into the architecture of Akraino, StarlingX and OpenCord and compares them with ETSI MEC RA. Speakers include 99cloud’s Li Kai, Shuquan Huang and Intel’s Jianfeng JF Ding.
- “StarlingX CI, from zero to Zuul” Intel’s Hazzim Anaya and Elio Martinez will go over how CI works and how to create new automated new environments to extend functionality and cover new features and test cases that are not covered inside the OSF.
- “StarlingX Enhancements for Edge Networking” this session will cover the current state of the art as well as gaps in edge networks as well as go over StarlingX’s core projects, core networking features and enhancements for edge.
Get involved
Keep up with what’s happening with the mailing lists: lists.starlingx.io
There are also weekly calls you can join: wiki.openstack.org/wiki/StarlingX#Meetings
Or for questions hop on Freenode IRC: #starlingx.
You can also read up on project documentation: https://wiki.openstack.org/wiki/StarlingX
- OpenStack Homebrew Club: Meet the sausage cloud - July 31, 2019
- Building a virtuous circle with open infrastructure: Inclusive, global, adaptable - July 30, 2019
- Using Istio’s Mixer for network request caching: What’s next - July 22, 2019